通常、連続的な物体の運動を考えるときは、その物体を細かく分解して考える。今回考える弦の振動も例外ではない。
今回は、弦の運動が一次元の波動方程式を満たすことを示す。
目次
弦の設定
弦の分割
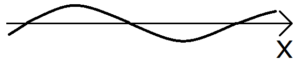
上図のような、変位が小さい弦の振動を考える。張力(弦を両側から引っ張る力)は\(T\)とおく。まず、弦の一部分に注目してみる。
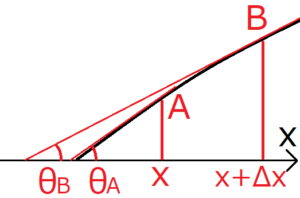
x軸を基準にして弦を分割する。まず、x軸上の任意の点\(x\)から微小距離だけ離れた地点\(x+Δx\)までの範囲に注目する。点\(x\)における弦の位置を\(A\)、点\(x+Δx\)における弦の位置を\(B\)とおく。さらに、点\(A\)での弦の接線とx軸がつくる角度を\(θ_A\)、点\(B\)での弦の接線とx軸がつくる角度を\(θ_B\)とおく。
接線に注目する理由は、弦ABにかかる張力はそれぞれの点の接線方向にかかるからだ。
弦ABにかかる力
点Aにかかる力
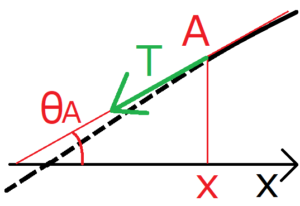
弦ABにかかる張力を成分ごとに考えるために、まず点Aにかかる力を考える。点Aでの弦の接線方向に張力がかかると考えれば、張力\(T\)は図のような方向にかかることになる。したがって、この張力\(T\)は、x軸に水平な方向の力\(F_{A//}\)と、x軸に垂直な方向の力\(F_{A⊥}\)に分解される。そしてそれらは\(θ_A\)を使って次のように表現できる。
$$F_{A//}=-Tcosθ_A$$
$$F_{A⊥}=-Tsinθ_A$$
張力\(T\)は、x軸方向と変位方向とは逆向きになっている。だから、\(F_{A//}\)と\(F_{A⊥}\)の両方にマイナスがつく。
点Bにかかる力
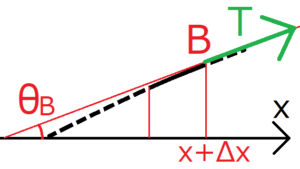
点Bにかかる力も、点Aと同様にして求められる。ただし、x軸方向かつ上方向に\(T\)が向いているため、\(F_{B//}\)と\(F_{B⊥}\)は正になる。
$$F_{B//}=Tcosθ_B$$
$$F_{B⊥}=Tsinθ_B$$
両方の力の和
以上から、弦ABにかかる方向別の力は、次のようになる。
弦ABの動き
x軸方向の力
今は変位が小さい運動を考えているため、\(θ_A<<1\)、\(θ_B<<1\)である。したがって、cosをテイラー展開すると、次の近似が成り立つ。
これを\(F_{//}\)の式に代入する。
上下方向の力
sinも同様にして、次のように近似する。
$$cosθ_B≒θ_B$$
これを\(F_{⊥}\)の式に代入する。
両方の力の比較
\(θ_A,θ_B<<1\)より、\(θ_A^2<<θ_A\)、\(θ_B^2<<θ_B\)である。したがって、次の式が成り立つ。
この式から、x軸に平行方向の力よりも、x軸に垂直方向の力の方がはるかに大きいことがわかる。これ以降、水平方向の力は無視し、垂直方向の力のみを考える。
運動方程式の構築
弦の垂直方向の変位を\(z(x,t)\)、弦の線密度(単位長さあたりの質量)を\(ρ\)とする。これらのパラメータと垂直方向の力\(F_{⊥}\)を組み合わせて、\(m\ddot{z}=F_⊥\)に当てはめれば、次の運動方程式を得る。
ここで、\((θ_B-θ_A)\)を変位\(z(x,t)\)で表せれば、この式をすっきりさせられそうだ。
角度\(θ\)を変位\(z\)で表す
点\(A\)における接線の傾き\(z’\)は、変位\(z\)を\(x\)で偏微分したものとなる。
また、接線の傾きはtanを使っても表せる。\(θ<<1\)で\(tanθ≒θ\)という近似を使うと、
これを、上の運動方程式の右辺に作用させると、
高校で学習した微分の定義より、\(Δx→0\)ならば、\(\frac{z'(x+Δx,t)-z'(x,t)}{Δx}→\frac{∂^2z}{∂x^2}\)だから、
あとはこれを運動方程式の右辺に代入すればよい。
波動方程式の導出
上で求めた式の両辺を\(ρΔx\)で割ると、求めたい式が現れる。
\(v^2≡\frac{T}{ρ}\)とおくと、
以上で、一次元の波動方程式が求められた。
\(v^2≡\frac{T}{ρ}\)より、張力\(T\)が大きく、線密度\(ρ\)が小さいほど、波が伝わる速さが速くなる。
まとめ
微小の長さの弦に加わる力から、波動方程式を求めた。
参考文献
・長谷川修司(2009)『講談社基礎物理学シリーズ2 振動・波動』,講談社.
関連記事(広告含む)

波動方程式の導出の一つ前の行の左辺、2回微分ではないでしょうか?(細かいつっこみですみません、、、)
ご指摘いただきありがとうございます。
該当箇所を修正いたしました。
今後とも物理メモをよろしくお願いします。